产品概述
专为教学科研设计,降低无人机研究门槛
降低门槛
降低无人机研究门槛,让高校实验室和科研机构能够轻松开展无人机相关研究项目。
完整环境
提供完整的二次开发环境,包括仿真系统、开发工具、API文档和示例代码。
无缝过渡
支持从仿真到真机的无缝过渡,仿真开发的代码无需修改即可在真机上运行。
技术亮点
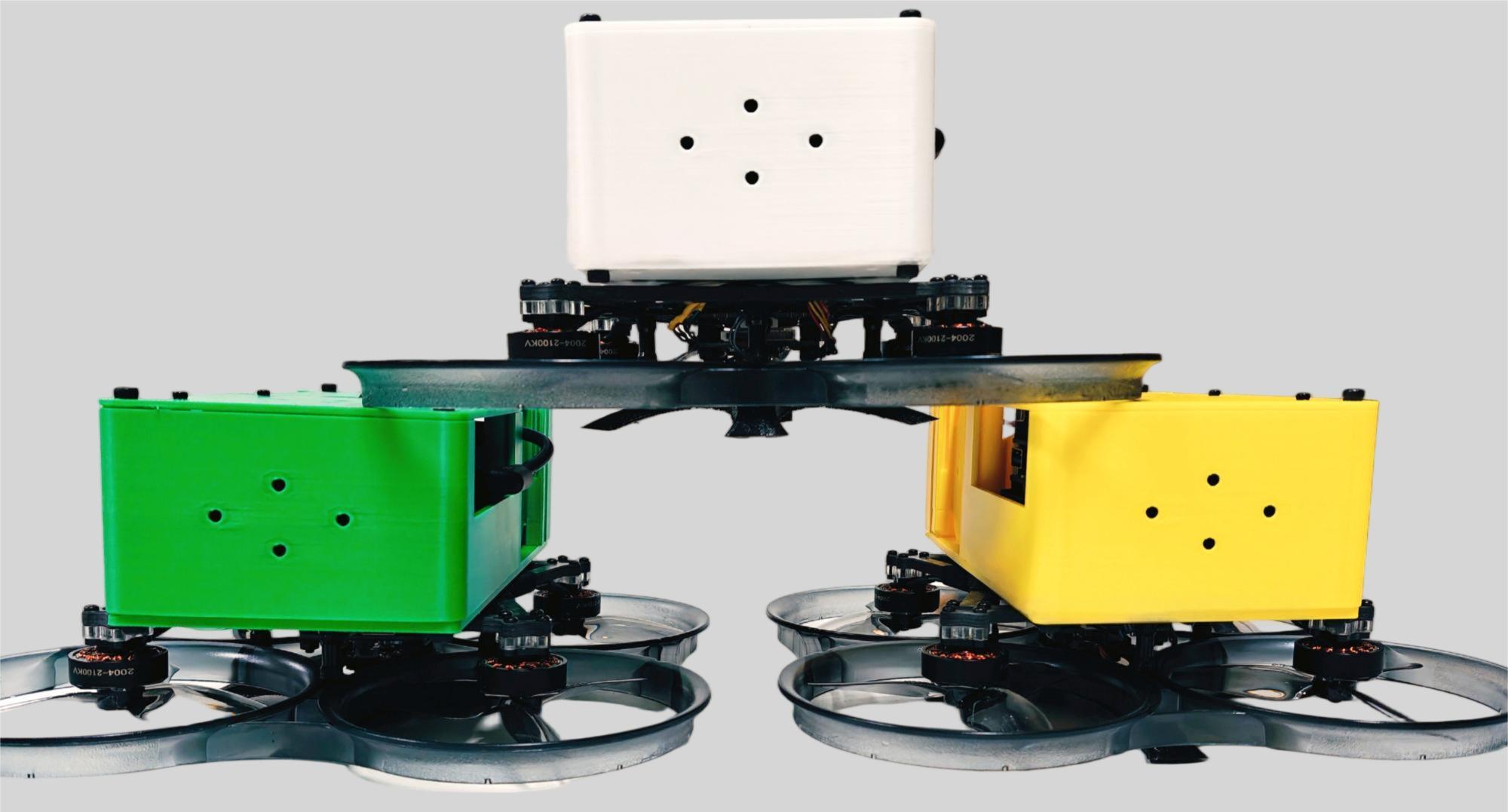
专业级硬件配置,确保飞行性能与安全性
机载计算平台对比
RK3588 机载电脑
处理器性能
8核处理器 (4×A76 + 4×A55)
AI算力
6 TOPS NPU
视频编码
4K@60fps H.265/H.264
适合视觉算法与AI推理应用
20min
空载续航时间
500g
最大负载能力
1km
通信距离
±2cm
RTK定位精度
应用场景
从教学实验到前沿科研,全方位覆盖
教学实验平台
支持无人机原理、自动控制、计算机视觉、ROS机器人操作系统、嵌入式系统等课程教学。 提供PID参数整定、视觉SLAM、目标识别、路径规划等实验项目。
PID参数整定
学习控制理论,实践参数调优
视觉SLAM
实现未知环境三维建图
前沿科研工具
支持自主导航算法、多智能体协同、强化学习、视觉-惯性融合SLAM、边缘计算等研究方向。 开源硬件设计,完整软件栈,丰富传感器选项。
多智能体协同
分布式算法验证
强化学习
智能控制策略
30机集群控制
支持最多30架无人机同时控制,实现大规模编队飞行与协同任务。 智能编队算法,支持圆形、方形、V形等多种队形。
30
最大集群数
6
编队队形
实时
协同控制

功能展示
动态展示产品核心功能
🎯
精准定位
RTK厘米级定位演示
🔄
自动避障
激光雷达避障演示
🌐
SLAM建图
视觉SLAM实时建图
🤖
目标跟踪
视觉目标跟踪演示
🎪
编队飞行
多机编队飞行演示
💻
仿真系统
Gazebo仿真演示